
My name is Alex Horne and for my Senior Project I, along with with my classmate Ben, am building a tour guide robot for Westtown School’s Admissions office. We are both heavily involved in Westtown’s Robotics Team, which Ben is a co-captain of. I’ve been building combat robots (made famous by the former TV show BattleBots) for the past three years. So between the two of us I’d say we’ve got at least a little experience with robots.
So now that I’ve got the brief overview of the project part and the bit about me out of the way, I figure that I should explain a bit about the content of my blog posts. Its going to be a build log of the robot, but not a build log in the sense of “I then took the 3″ long hex head 1/4-20 screw and inserted it in the tapped hole and rotated it 23 times until it was tight”. I mean build log as in a journal of the design/build process and the thoughts/theory behind it.
The original concept of a robot accompanying a tour guide on a Westtown campus tour was brought up by Westtown Robotics Team Mentor and teacher, Steve Compton, as a project for the robotics team but was put on hold for a few years because the robotics team was busy on other projects. Fast forward a couple years from the initial idea and the stagnation of it, Ben and Alex were looking for a good Senior Project that would be cheaper than flying and allow them to stay in the area to compete with Westtown’s Robotics Team.
The work behind TourBot started back in October when Ben went on a recon mission to the Admissions office to find out what they wanted the robot to do.
They had four requirements:
- Meet visitors in the admissions office
- Follow the tour guide
- Interact with the tour guide through video and audio
- Be able to go from the Admissions building to the Science Building, and navigate the first floor
At first glance these seem like easy requirements, I mean every robot I’ve built or worked on has had wheels and been able to drive, Ben has programed autonomous functions into robots before and an iPad on a stick would solve the multimedia display thing. Sounds easy, right?
Well, not quite…
Upon further examination of the project and the goals we realized that the robot would have to:
- Drive outside. (this is much harder than you think because of uneven surfaces and changing conditions such as water, sticks in the way and sidewalk cracks)
- Drive inside, which means going over door jams and operating on both carpet and hard surfaces.
- Be able to operate smoothly on all surfaces because a jerky/jumpy robot just looks bad.
- Autonomously navigate from the Admissions Office to the Science Building and then navigate around the Science Building.

The robot would have to drive from the building on the right to the one on the left. - Have a way to remotely cue up the multimedia/send the robot off to its next location.
- And a manual override function should the robot start going the wrong direction or the tour takes a detour.
- Be simple enough to use that somebody without robotics expertise (aka a typical tour guide) can work it.
- Look cool enough that it is interesting because a box with wheels and an iPad on a stick just isn’t that fun too look at.

With these goals in mind, Ben and I started to design…
Idea #1

One of the first ideas that made past the vague idea phase was well, a box on wheels with an iPad on a stick. But the cool part was whole body would open up and the iPad on a stick could fold down into the robot’s body when the robot was driving so that the robot’s center of gravity would be lower, making the robot less likely to tip over when moving. The design would have worked but it was too ugly for my liking.
Idea #2
A riderless segway with an iPad on it. It would have been able to easily get over bumps, would have had the “wow factor” and be simple to build. Ben said no because coding it would have been a nightmare.
Idea #3
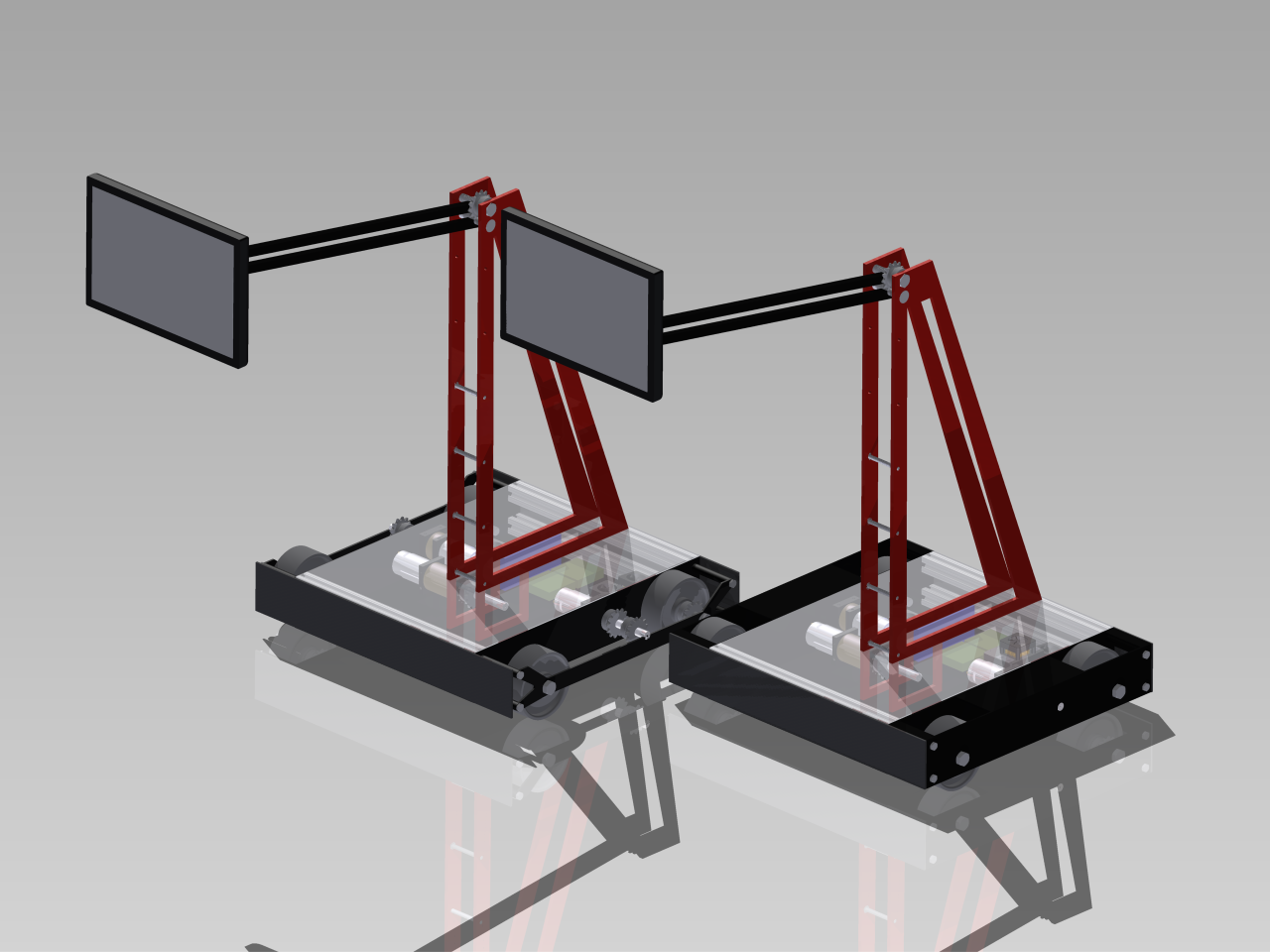
A mini FIRST robot. Ben and I are both on Westtown’s robotics team which competes in FIRST Robotics Competition. Each year the task the robots have to do changes but overall robots tend to have a similar feel to them, regardless of the years challenge. I tried to capture that feel in this design while meeting the requirements set out for the robot. The iPad on a stick became an iPad on a desk lamp type arm, the drivetrain is 4 wheel drive with 1 1/2 inches of ground clearance to get over sidewalk cracks and will be constructed out of aircraft grade aluminum.
We settled on Idea #3 for a couple of reasons, it was fairly simple with few moving parts, has a decent amount of ground clearance, a robust hard to break design and looks pretty cool.
For anyone who cares about mechanical specs
- the footprint is 18″x22″4″ for the drivebase and the arm is 2′ high when retracted and 4′ high when extended
- 4wd powered by two banebots 550 motors (these are the motors typically found in cordless drills)
- arm is also powered by a banebots 550 motor, geared down 256:1
- the drivetrain is geared for about 5 feet per second or 3mph which is your average walking speed
Once a design capable of meeting the requirements was pinned down the next task was figuring out how to make it autonomous. (Ben has experience with making robots autonomous but not on the scale of this project) The first idea was to simply use a GPS to determine where the robot was and make it drive based entirely off of that. After researching GPS’s we realized we didn’t quite have the budget for a GPS that was accurate enough. Next idea, RFID tags, same story too expensive. Eventually we came to the conclusion that driving from the Admissions Building to Science Building would be too difficult and expensive with the budget we had. The project scope was changed to the robot would only tour Main Hall which when you think about it probably is better for the tour too because there is more to talk about in Main Hall. The current plan is to use wheel encoders and sonar sensors to determine where the robot is in Main Hall have it make its next move based on gathered information. Ben has also thrown around the idea of using an X-box Connect as a sensor becasue it has a camera and sonar built in to it and has a well established community for modifications to it.
Coming up next time on TourBot: we build it. (or at least start to)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pingback: TourBot 3: More Stuff Gets Build… | Westtown Senior Projects' Blog
Pingback: TourBot 2: Stuff gets Built… | Westtown Senior Projects' Blog